Light Detector
Context: During the CIRC competition we must follow a series of red, blue, and infrared lights, while searching for crates labeled with AR tags. For full context consider reading the CIRC Traversal Mission rules or ask a lead for a verbal description.
Problem: We currently have no infrastructure for doing this task fully autonomously. Thus, you will devise a perception pipeline for detecting and publishing the locations of the lights, as well as design a algorithm which will traverse along these waypoints.
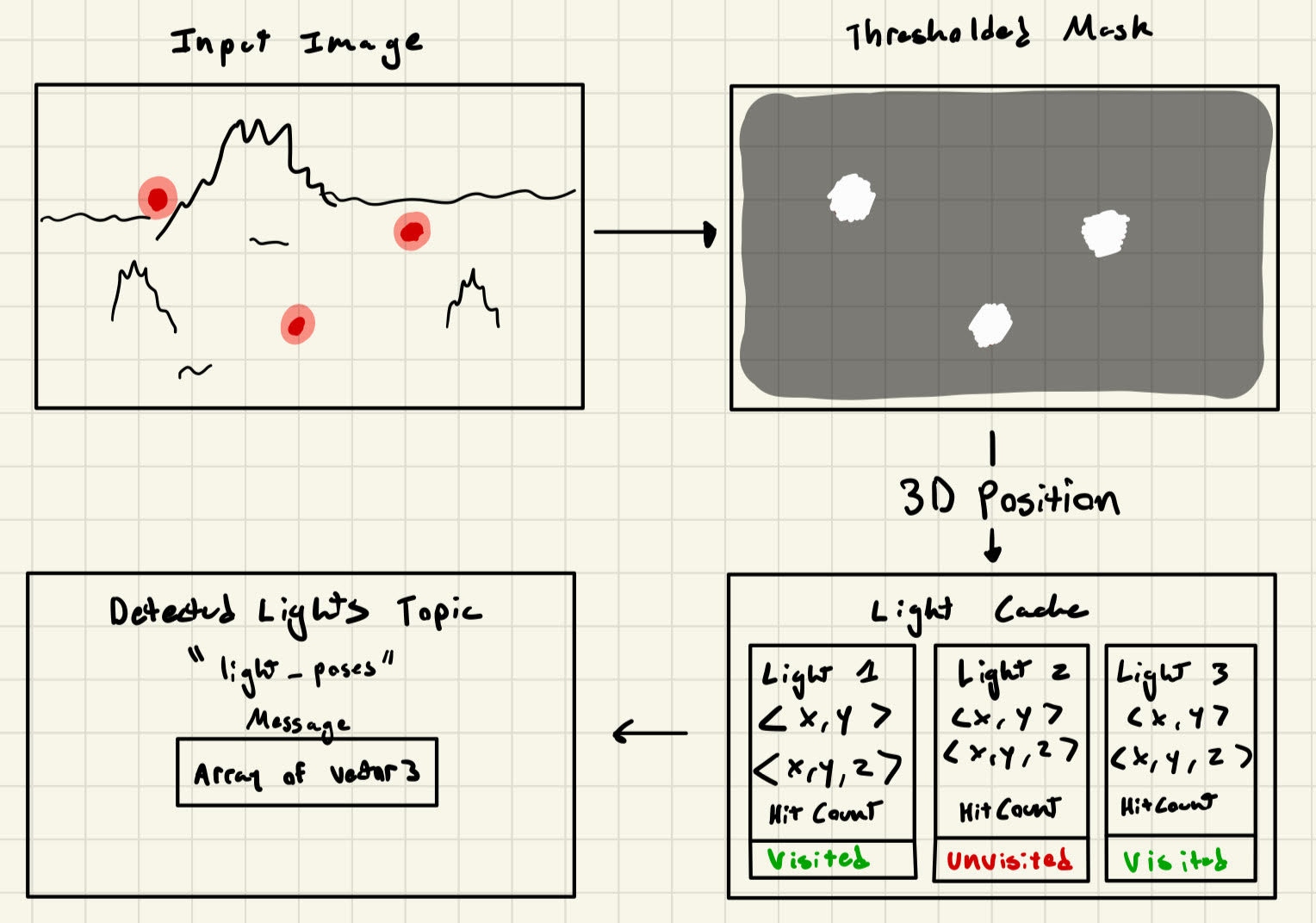
Solution: Use the ZED and perform a thresholding algorithm to locate the lights in image space. Then, using the point cloud generated by the ZED, estimate these objects in 3D space and add them to a cache. Upon each time a given location is detected with a light, increment a hitcounter. Once this counter goes beyond a threshold (will be determined with testing in sim and IRL) publish their locations to topic named "light_poses".
Interface (subject to change)
Node: light_detector
Subscribes: sensor_msgs/PointCloud2 (ZED point cloud)
Publishes: Vector of geometry_msgs/Vector3 (Array of Vector3)
Should Look Something Like this
Vector3[] lights
Rough Steps:
- Use OpenCV Thresholding (over either RGB or HSV) to detect the lights in image space
- Use OpenCV Contours to determine light image space location
- Use the ZED's point cloud to find the corresponding 3D point to the center of the detector light
- Create a light cache with hit counts (probably using
std::unordered_map) - Update hit counts as new lights are detected
- Publish custom light position message to
"light_poses"
Below is a diagram which shows the perception pipeline: