These screenshots were taken from the ArcKit Demo App. Compile and run the Demo App on device to experiment with the SDK and see results in your local area.
ArcKit uses a two pass system of filtering and smoothing location data.
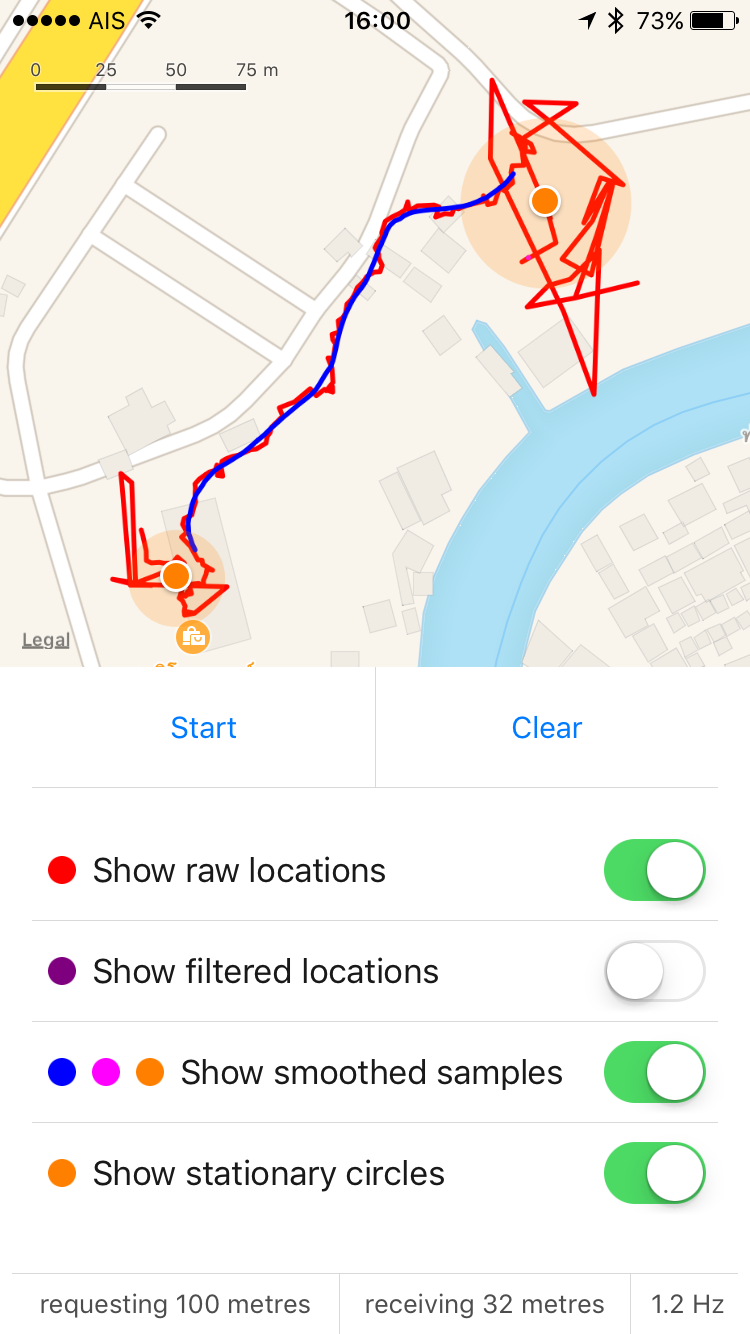
The first pass is a Kalman filter to remove noise from the raw locations. The second pass is a dynamically sized, weighted moving average, to turn potentially erratic paths into smoothed, presentable lines.
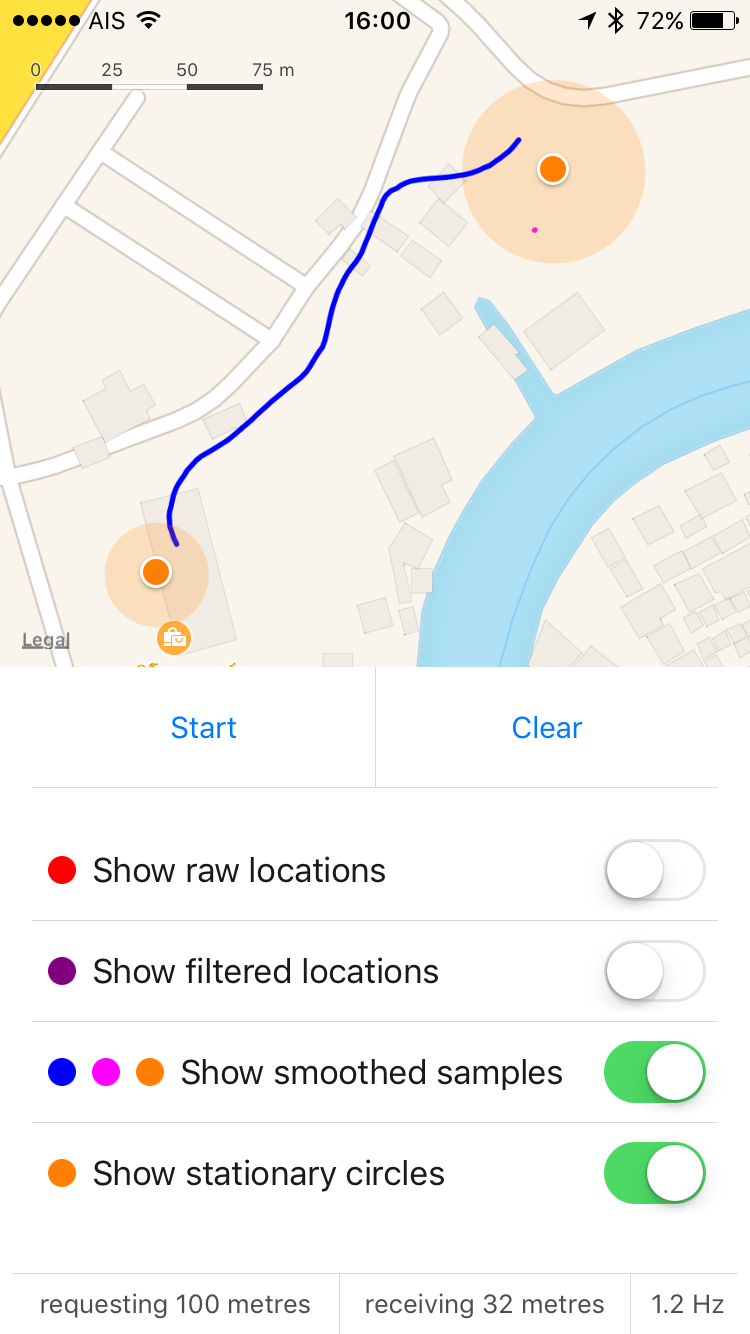
| Raw (red) + Smoothed (blue) | Smoothed (blue) + Visits (orange) | Smoothed (blue) + Visits (orange) |
|---|---|---|
 |
 |
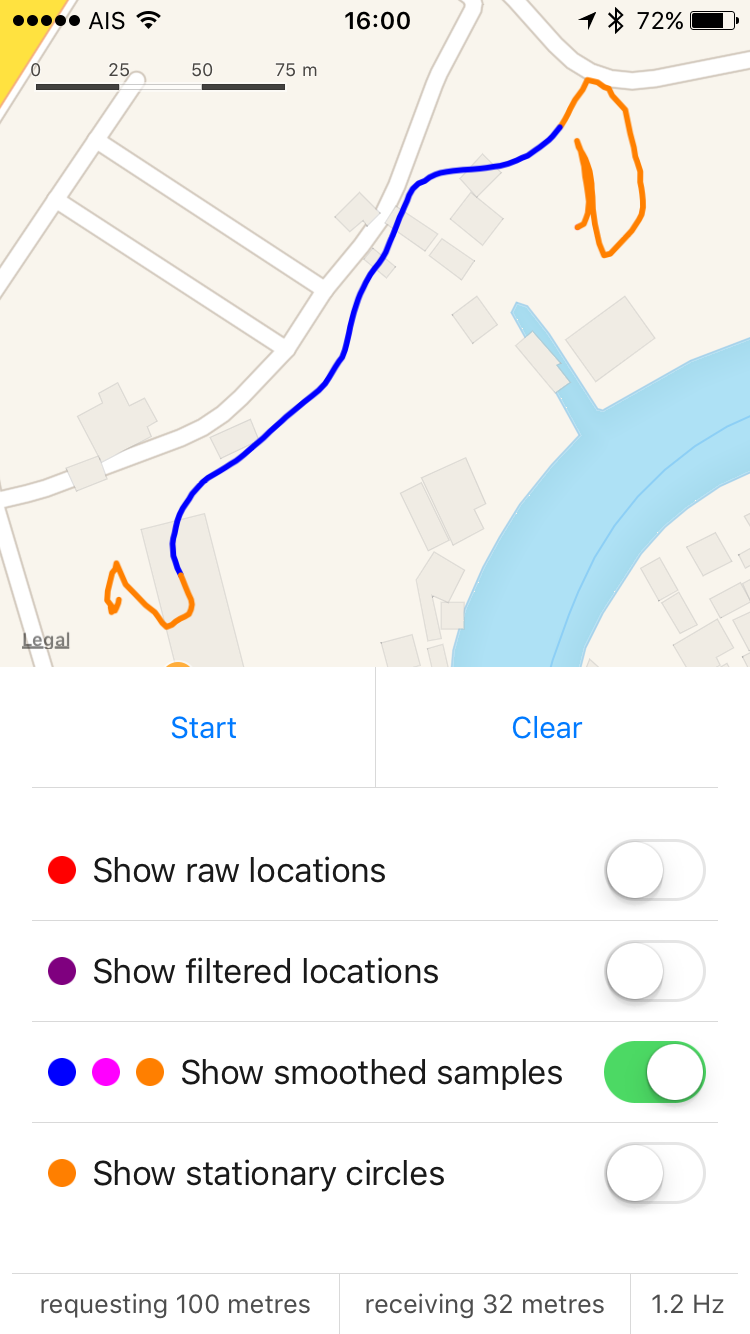 |
The blue segments indicate locations that ArcKit determined to be moving. The orange segments indicate stationary. Note that locations inside buildings are more likely to classified as stationary, thus allowing location data to be more easily clustered into "visits".
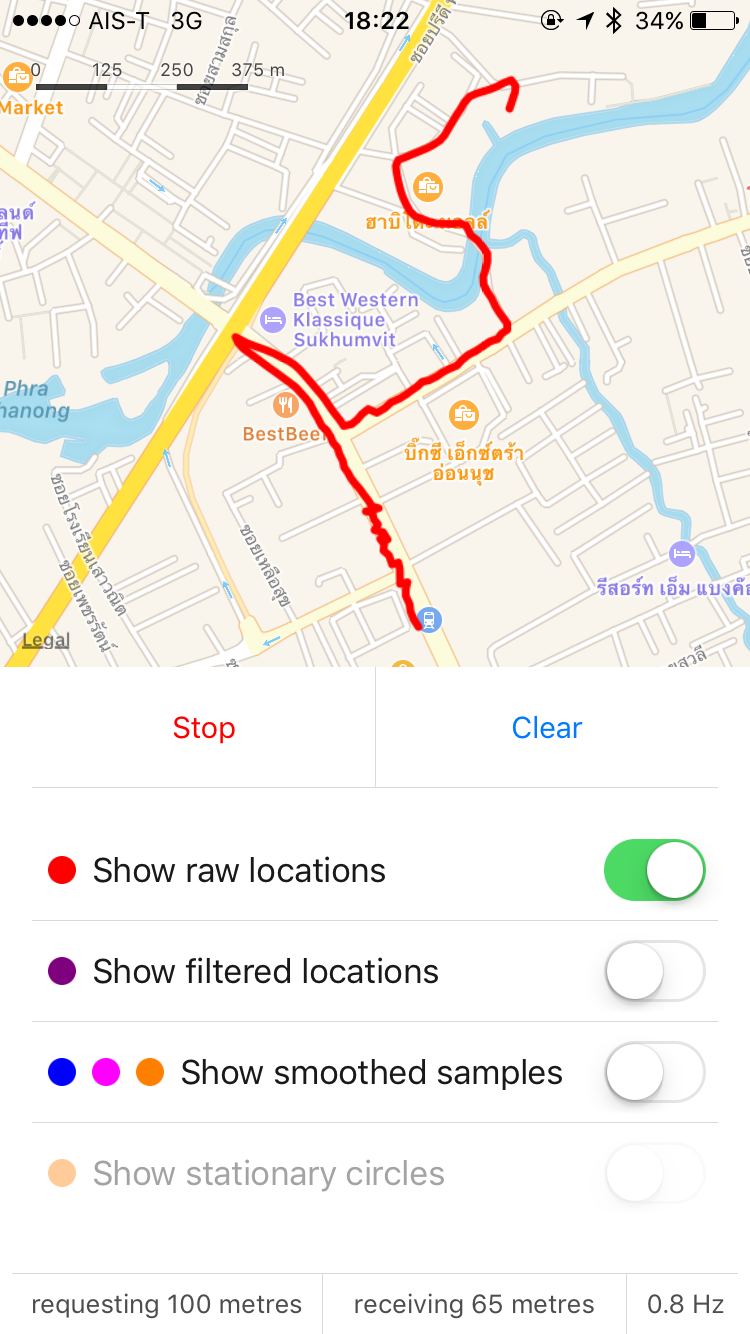
| Raw Locations | Smoothed (blue) + Stuck (orange) | Smoothed (blue) + Stuck (orange) |
|---|---|---|
 |
 |
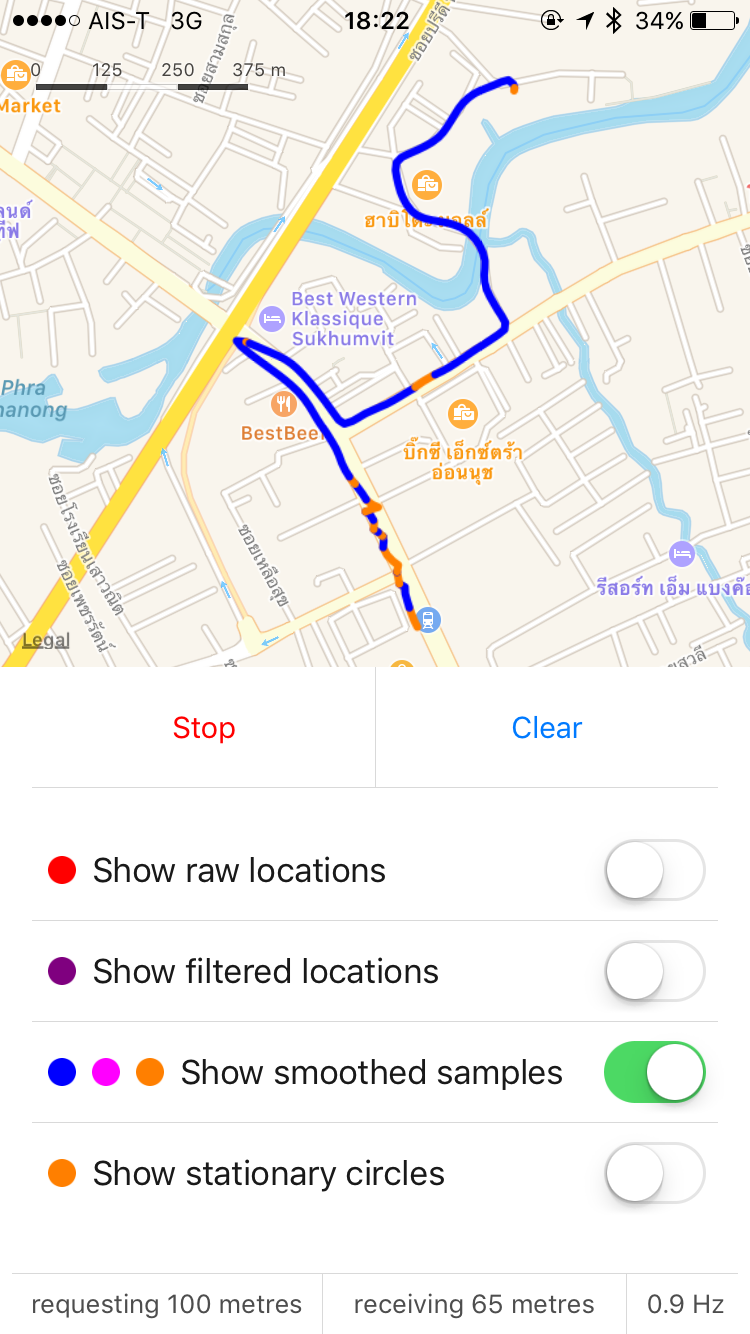 |
Location accuracy for this trip ranged from 30 to 100 metres, with minimal GPS line of sight and significant "urban canyon" effects (GPS blocked on both sides by tall buildings and blocked from above by an elevated rail line). However stationary / moving state detection was still achieved to an accuracy of 5 to 10 metres.
Note: The orange dots in the second screenshot indicate "stuck in traffic". The third screenshot shows the "stuck" segments as paths, for easier inspection.