Failure when trying to read from serial port #1
Comments
|
Hi, I am not currently using this driver but I might be able to help anyway. Have you checked that you are connected to the roboteq driver using Note that there are more critical values encoded in the source files so make sure to have a look before running. |
|
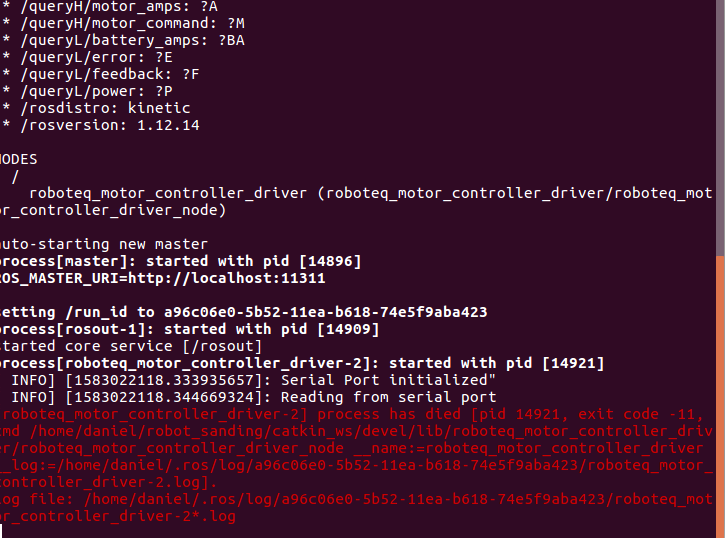
I think I am connecting using /dev/ttyACM0 because as can be seen in the terminal screenshot, the port is initialized (which means it is somehow able to connect). I looked in that file, but it's difficult to tell what could be causing the process to die |
|
Hi, |
|
Hi @SyuanLiao Is that mean the mbs script inside the controller must be emptied in order to use this ROS-driver node? Best, |
|
Hi @HappySamuel, Best Regards, |
|
Hi @SyuanLiao If that's the case, how shall i control 4 motors with 2 motor controllers to achieve skid steering? Isn't that a mbs script is needed inside the master motor controller in order to control the slave motor controller, which may result unavailable of using this ROS-Driver node? 如果是这样的情况的话, 那么我该如何使用 2 个 motor controller 来控制 4 个 motors 来达成滑移控制? 因为需要在 master 的 motor controller 里安装 mbs 的程式来控制 slave 的 motor controller,对吗?然而安装了 mbs script 的话,岂不是就无法用这个 ROS-Driver node 了? Best, |
|
Hi @HappySamuel, |
|
Hey guys, I appreciate your help. I ended up just using the API and writing my own program, since we needed to do some custom work. This issue can be closed if no one else needs it. |
|
Hi guys, I am having the same issue here! The driver is connected to the /dev/ttyACM0, and I do not have any script running in the controller. @SyuanLiao, how did you cleaned the scripts? Thanks! |

Hi @danielj195 , Thanks for the reply. Any other tips? Best, |
|
What type of controller are you using? The only other thing I can think of
trying is commenting out several of the queries in the query.yaml file.
See if it works with just one query (e.g. encoder count). Maybe also try
changing the frequencies at the top of the query.yaml file, it could be
that the frequency is too fast for your controller
…On Mon, Jun 8, 2020 at 4:27 AM Marcelo ***@***.***> wrote:
I've been using this package for quite awhile and it still occasionally
dies. If you're not connecting to the port at all, then it might be because
the port is closed. Try "sudo chmod 777 /dev/ttyACM0"
… <#m_-9030135213278553355_>
On Fri, Jun 5, 2020 at 11:27 AM Marcelo *@*.***> wrote: Hi guys, I am
having the same issue here! [image: roboteq_error] <
https://urldefense.com/v3/
*https://user-images.githubusercontent.com/2048810/83896879-b983d800-a74c-11ea-84b2-93f325cff960.png*
;!!KwNVnqRv!SvZQTJc6tfCoSEbj5Tld-QMqA4gj3sJS-tO6k1bFO3IhUWtJeVeq-7IWcERh73ou$
<https://urldefense.com/v3/__https://user-images.githubusercontent.com/2048810/83896879-b983d800-a74c-11ea-84b2-93f325cff960.png__;!!KwNVnqRv!SvZQTJc6tfCoSEbj5Tld-QMqA4gj3sJS-tO6k1bFO3IhUWtJeVeq-7IWcERh73ou%24>>
The driver is connected to the /dev/ttyACM0, and I do not have any script
running in the controller. I tried in two different computers with ROS
Kinetic but no luck. @SyuanLiao
<https://urldefense.com/v3/__https://github.com/SyuanLiao__;!!KwNVnqRv!SYeYi5rWuS21ya5u2xCxV9sq8itfvASzJwhoGK-3f8lxL8diQjAewhe10HWKWbR0$>
<https://urldefense.com/v3/*https://github.com/SyuanLiao*
;!!KwNVnqRv!SvZQTJc6tfCoSEbj5Tld-QMqA4gj3sJS-tO6k1bFO3IhUWtJeVeq-7IWcBMROCrN$
<https://urldefense.com/v3/__https://github.com/SyuanLiao__;!!KwNVnqRv!SvZQTJc6tfCoSEbj5Tld-QMqA4gj3sJS-tO6k1bFO3IhUWtJeVeq-7IWcBMROCrN%24>>,
how did you cleaned the scripts? Thanks! — You are receiving this because
you authored the thread. Reply to this email directly, view it on GitHub <
https://urldefense.com/v3/
*#1*issuecomment-639611227*
;Iw!!KwNVnqRv!SvZQTJc6tfCoSEbj5Tld-QMqA4gj3sJS-tO6k1bFO3IhUWtJeVeq-7IWcCNK2kcy$
<https://urldefense.com/v3/__https://github.com/Roboteq-Inc/ROS-Driver/issues/1*issuecomment-639611227__;Iw!!KwNVnqRv!SvZQTJc6tfCoSEbj5Tld-QMqA4gj3sJS-tO6k1bFO3IhUWtJeVeq-7IWcCNK2kcy%24>>,
or unsubscribe <https://urldefense.com/v3/
*https://github.com/notifications/unsubscribe-auth/AENT573R7NJZLMHLQX5A3OLRVEMG5ANCNFSM4K67ZW6A*
;!!KwNVnqRv!SvZQTJc6tfCoSEbj5Tld-QMqA4gj3sJS-tO6k1bFO3IhUWtJeVeq-7IWcArcmqTo$
<https://urldefense.com/v3/__https://github.com/notifications/unsubscribe-auth/AENT573R7NJZLMHLQX5A3OLRVEMG5ANCNFSM4K67ZW6A__;!!KwNVnqRv!SvZQTJc6tfCoSEbj5Tld-QMqA4gj3sJS-tO6k1bFO3IhUWtJeVeq-7IWcArcmqTo%24>>
.
Hi @danielj195
<https://urldefense.com/v3/__https://github.com/danielj195__;!!KwNVnqRv!SYeYi5rWuS21ya5u2xCxV9sq8itfvASzJwhoGK-3f8lxL8diQjAewhe10FyRCw-s$>
,
Thanks for the reply.
Since the serial port was initialised I believe I can open the port.
Anyway, I just tried using "sudo chmod 777 /dev/ttyACM0", but I received
the same error.
Any other tips?
Best,
Marcelo
—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub
<https://urldefense.com/v3/__https://github.com/Roboteq-Inc/ROS-Driver/issues/1*issuecomment-640485774__;Iw!!KwNVnqRv!SYeYi5rWuS21ya5u2xCxV9sq8itfvASzJwhoGK-3f8lxL8diQjAewhe10BZDQwOw$>,
or unsubscribe
<https://urldefense.com/v3/__https://github.com/notifications/unsubscribe-auth/AENT57Z5WIOTFIEGYDMO76DRVSVHJANCNFSM4K67ZW6A__;!!KwNVnqRv!SYeYi5rWuS21ya5u2xCxV9sq8itfvASzJwhoGK-3f8lxL8diQjAewhe10L9TqzU8$>
.
|
{kind=link}
|
If you are running a 2130 you can use this node. https://github.com/rbonghi/roboteq_control I've been using it for around 2 years now with no problems. Not ROS2 compatible. Shouldn't be too difficult to modify for use with other models of controller. |
Hi,
I am trying to use this ROS driver to command motor position. When I launch the launch file in the readME, I get the error shown in the screenshot below. The motor I have is sdc2160 and I'm using ROS kinetic. Any help would be greatly appreciated!
The text was updated successfully, but these errors were encountered: